Skip to main content
Search
Search This Blog
The Bleeding Edge Machine
Posts
Showing posts from May, 2013
Show all
May 23, 2013
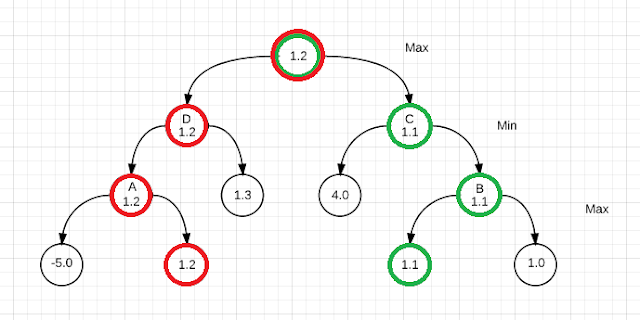
probabilistic alpha beta search
May 05, 2013
2013 Google Code Jam Round 1B
Newer Posts
Older Posts
Home